

ąąśIą┬┬ä
─·Ą─«öŪ░╬╗ų├Ż║┤┼ĘŁ░Õę║╬╗ėŗ > ą┬┬äųąą─ > ąąśIą┬┬ä >
▀B└m┬Ģ▓©š±Ę∙Ą─ĘŌķ]╚▌Ų„═Ōę║╬╗£y┴┐└Ēšō┼cėŗ╦ŃĘĮĘ©
1ĪóĖ┼╩÷Ż║
▒ŠčąŠ┐╠ß│÷┴╦ę╗ĘN╗∙ė┌▀B└m┬Ģ▓©š±Ę∙Ą─═Ōį┤ę║╬╗£y┴┐ĘĮĘ©ĪŻ═©▀^śŗĮ©15éĆČÓĖ▀╦╣╣Ō╩°»B╝ė─Żą═Ż¼Ęų╬÷┴╦łAą╬╗Ņ╚¹ę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„į┌Įī┘╣╠¾w┬Ģł÷ųąĄ─Ęų▓╝; Ė∙ō■│¼┬Ģ▓©Ą─Ę┤╔õ║═š█╔õ╠žąįŻ¼ėŗ╦Ń│÷╗ž┬Ģē║┴”Ą─ėŗ╦ŃĘĮĘ©ĪŻ╚²Ę∙š±Ę∙Ą─▀B└m▓©▒╗ė├ū„│¼┬Ģ▓©ę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─“īäėį┤Ż¼▓╔ė├ā╔éĆų▒ÅĮŽÓ═¼Ą─å╬Š¦ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„ū„×ķ│¼┬Ģ▓©░l╔õČ╦ūė║═Įė╩šČ╦ūėŻ¼ī”╦─ĮM▓╗═¼▒┌║±Ą─╚▌Ų„▀MąąīŹ“ׯ¼▓ó▒╚▌^╚²ĘNš±Ę∙Ą─“īäėį┤╗ž▓©─▄┴┐╠žš„ĪŻĄ═ė┌▓╗═¼▒┌║±Ą─ę║╬╗ĪŻā╔ĮM▓╗═¼ų▒ÅĮĄ─ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„ė├ė┌£y┴┐īŹ“×─Żą═Ą─ę║╬╗Ż¼▓óĘų╬÷║═▒╚▌^ā╔ĮMę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─£y┴┐š`▓ŅĪŻīŹ“×ĮY╣¹▒Ē├„Ż¼įō─Żą═Ą─£y┴┐š`▓ŅąĪė┌5 mmŻ¼▀mė├ė┌ČÓéĆŅIė“Ą─ę║¾w╗“ę║¾w╗ņ║Ž╬’Ą─ę║╬╗£y┴┐ĪŻā╔ĮM▓╗═¼ų▒ÅĮĄ─ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„ė├ė┌£y┴┐īŹ“×─Żą═Ą─ę║╬╗Ż¼▓óĘų╬÷║═▒╚▌^ā╔ĮMę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─£y┴┐š`▓ŅĪŻīŹ“×ĮY╣¹▒Ē├„Ż¼įō─Żą═Ą─£y┴┐š`▓ŅąĪė┌5 mmŻ¼▀mė├ė┌ČÓéĆŅIė“Ą─ę║¾w╗“ę║¾w╗ņ║Ž╬’Ą─ę║╬╗£y┴┐ĪŻā╔ĮM▓╗═¼ų▒ÅĮĄ─ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„ė├ė┌£y┴┐īŹ“×─Żą═Ą─ę║╬╗Ż¼▓óĘų╬÷║═▒╚▌^ā╔ĮMę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─£y┴┐š`▓ŅĪŻīŹ“×ĮY╣¹▒Ē├„Ż¼įō─Żą═Ą─£y┴┐š`▓ŅąĪė┌5 mmŻ¼▀mė├ė┌ČÓéĆŅIė“Ą─ę║¾w╗“ę║¾w╗ņ║Ž╬’Ą─ę║╬╗£y┴┐ĪŻ
║åĮķŻ║
į┌Ę┼B╣▐║═Ųõ╦³╚▌Ų„▓─┴ŽĄ─Ė▀Č╚║═¾wĘe£y┴┐═©│Ż▓╔╚Īį┌╗»╣żŻ¼╩│ŲĘĄ─┤µā”║═╩»ė═į┌╔·«a▀^│╠ųąŻ¼ęį┤_▒Ż▓─┴Ž╣®ĮoĄ─[ 1Ż¼2 ]ĪŻ
ė░Ēæ£y┴┐Š½Č╚Ą─ę“╦ž╩Ūīó▒╗šJ×ķ╩Ūį┌╚▌Ų„Ą─├▄ĘŌĮķ┘|Ż¼Ė»╬gąį╬’┘|Ż¼ČŠąį║═▒¼š©ąįĄ─▓─┴Ž[ 3Ż¼4 ]ĪŻ×ķ┴╦ØMūŃĖ„ĘNė░Ēæę“╦žĄ─ę¬Ū¾Ż¼ķ_░l┴╦ę║╬╗ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„ĪŻ─┐Ū░Ż¼╔╠śIę║╬╗£y┴┐░³└©└ū▀_Ż¼│¼┬Ģ▓©Ż¼═¼╬╗╦ž╗“Ę┼╔õąįŻ¼ļŖūėŻ¼¤ßīWŻ¼╣ŌīWāx▒Ē║═ę║ē║ėŗĪŻļm╚╗▀_ĄĮ│╔╣”Ą─æ¬ė├Ż¼╦³éā▒žĒÜ▒╗ų▒ĮėįOų├┼cę║¾w▀BĮė╚▌Ų„Ż¼╗“į┌ąĶꬥ─┬Ģ▓©║═ļŖ┤┼▓©[ 5Ż¼6 ]ĪŻ
╩»ė═Ż¼╗»╣żŻ¼─▄į┤Ż¼║Į┐š║Į╠ņ║═Ųõ╦¹ąąśIĄ─╠ž╩Ō╔Ļšł╚╦Śl╝■ę¬Ū¾īŻķTĄ─ę║╬╗£y┴┐║═įOéõĪŻī”ė┌ęū╚╝╬’║═▒¼š©╬’Ą─Śl╝■Ż¼│¼Ą═£žŻ¼Ė▀ē║Ą╚ę║¾wĄ─æ¬ė├╠žąįŻ¼ā”┤µæ¬░▓ų├į┌┤¾ą═Ż¼├▄ķ]╚▌Ų„║═Ą═£žŻ¼Ė▀ē║ŁhŠ│ųą▀hļxļŖŻ¼┤┼Ż¼┼÷ū▓Ż¼║═Ųõ╦¹╬ŻļU▓┐╬╗Ż¼ī”╦«ŲĮ£y┴┐ĘĮĘ©║═įŁ└Ē╠ß│÷┴╦Ė³Ė▀Ą─ę¬Ū¾ĪŻ
Ķbė┌▀@ą®ĘĮĘ©Ą─ā׳c║═╚▒³cŻ¼▒ŠčąŠ┐╠ß│÷┴╦ę╗ĘNÖz£y─Żą═Ż¼ė├ė┌┤_Č©╗∙ė┌▀B└m┬Ģ▓©š±Ę∙Ą─├▄ĘŌ╚▌Ų„═Ō▓┐Ą─ę║╬╗Ż¼▓óŪę╦∙╠ß│÷Ą─ĘĮĘ©▓╗ąĶę¬į┌╚▌Ų„ųą░▓čbę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„╗“įOéõĪŻ╠ßŪ░Ż¼ę▓ø]ėąōpē─╚▌Ų„[Ą─╬’└ĒĮYśŗ║══Ļš¹ąį7Ż¼8 ]ĪŻ
▒ŠčąŠ┐╩╣ė├ČÓį¬Ė▀╦╣┬Ģ╩°─Żą═üĒ─ŻöM╚▌Ų„▒┌▌Ś╔õ┬Ģł÷ųąĄ─łAą╬╗Ņ╚¹╩ĮōQ─▄Ų„ĪŻĖ∙ō■╣Ō╩°é„▓źĄ─ą╬ĀŅ║═é„▓ź╠žąįŻ¼Ęų╬÷┴╦▓╗═¼Ū·┬╩Ą─╚▌Ų„▒┌ī”▌Ś╔õł÷Ą─ė░ĒæĪŻĖ∙ō■╚▌Ų„ųąÜŌ¾w║═ę║¾wĮķ┘|Ą─│¼┬Ģ▓©ūĶ┐╣▓Ņ«ÉŻ¼╗ž▓©┬Ģē║ėŗ╦Ń─Żą═Ż¼Į©┴ó┴╦┼c▀B└mĄ─┬Ģę¶▓©š±Ę∙[ 9Ż¼10Ż¼11Ż¼12 ]ĪŻ
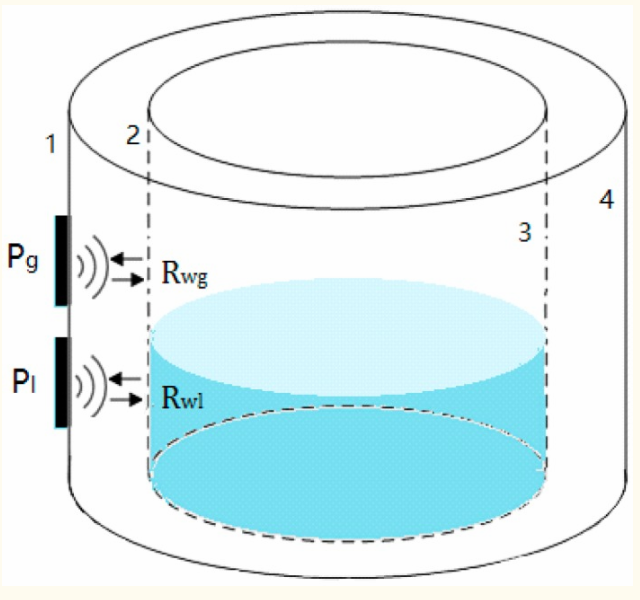
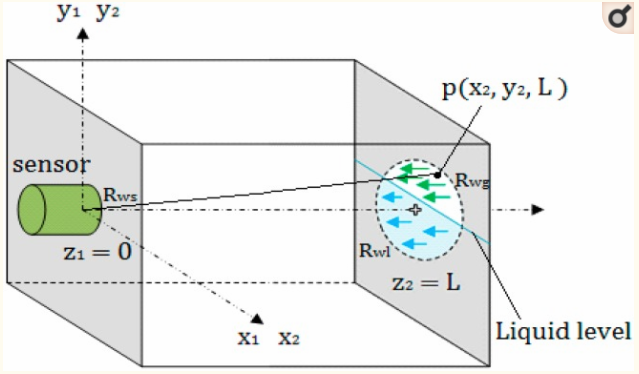
╚ńłD1╦∙╩ŠŻ¼R wg▒Ē╩Šę║├µ╔ŽĘĮā╚▒Ē├µĄ─Ę┤╔õŽĄöĄ; R wlųĖĄ─╩ŪĄ═ė┌ę║╬╗Ą─Ę┤╔õŽĄöĄĪŻ«öę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ęųäe╬╗ė┌ę║├µ╔ŽĘĮ║═Ž┬ĘĮĢrŻ¼ė╔ė┌▓╗═¼Ą─ūĶ┐╣Ż¼ā╚▒Ē├µ╠ÄĄ─Ę┤╔õŽĄöĄR wg║═R wl▓╗ŽÓĄ╚Ż¼▀@╩╣Ą├┼c╦∙Įė╩šĄ─╗ž▓©ŽÓĻPĄ─┬Ģē║▓╗═¼ĪŻ╚╗║¾į┌ę║╬╗ęį╔ŽĄ─┼RĮń³c╠ÄŻ¼╗ž▓©┬Ģē║▒Ż│ų║ŃČ©Ż¼▓óŪęę║╬╗Ž┬ĘĮėąę╗éĆ³cĪŻę“┤╦Ż¼Öz£yųą┬Ģē║Ą─ūā╗»╠žąįė├ė┌£y┴┐ę║╬╗ĪŻ
2Īó└Ēšō┼cĘĮĘ©
╣╠¾włAą╬╗Ņ╚¹ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─┬Ģł÷
į┌Ė▀╦╣▓©╩°»B╝ėĄ─╩«╬ÕéĆČÓūā┴┐─Żą═ųą[ 13 ]Ż¼╣╠¾wśė▒Šųą╚╬ęŌ³cŻ©x 2Ż¼y 2Ż¼z 2Ż®Ą─┬Ģē║┤¾ąĪ┐╔▒Ē╩Š×ķŻ©1Ż®
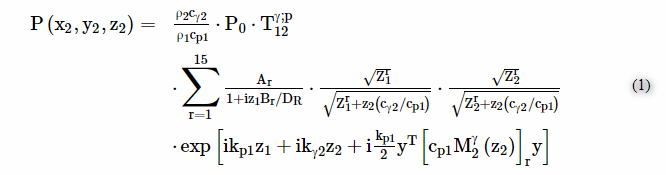
ŲõųąA r║═B r╩ŪČÓį¬Ė▀╦╣╣Ō╩°Ą─»B╝ėŽĄöĄŻ¼?γ ; p12╩ŪŲĮ├µ▓©é„▓źŽĄöĄĪŻģóöĄD R = k p1 a 2/2╩Ū╚└¹ŠÓļxŻ¼a╩ŪōQ─▄Ų„Ą─░ļÅĮŻ¼k p1╩ŪĮķ┘|1ųąP▓©Ą─▓©öĄĪŻŅÉ╦ŲĄžŻ¼kγ2Ż©α= pŻ¼sŻ®╩ŪĮķ┘|2ųąĄ─P▓©╗“S▓©Ą─▓©öĄĪŻZ 1╩ŪĄ┌ę╗Įķ┘|ųą£yįć┬Ģ╩°Ą─ąą│╠ķLČ╚; Z 2╩ŪĄ┌Č■Įķ┘|ųąĄ─ķLČ╚ĪŻP 0╩Ū│§╩╝╚ļ╔õ┬Ģē║ĪŻρ 1Ż¼ρ 2╩ŪĮķ┘|├▄Č╚Ż¼C P1╩Ūį┌ę║¾wųąĄ─┐v▓©Ą─▓©╦┘Č╚Ż¼C γ2 ╩Ū╣╠╝■śė▒ŠųąĄ─┐vŽ“╗“╝¶Ūą▓©╦┘Č╚ĪŻ ųą╠¢γ2 ╩Ū┼c│¼┬Ģ▓©╩°Ą─╚ļ╔õĮŪ║═Įń├µĄ─Ū·┬╩ŽÓĻPĄ─2×2ŠžĻćĪŻ
×ķ┴╦▀Mę╗▓ĮėæšōŻ¼įōĄ╚╩Į▒╗║å╗»×ķ
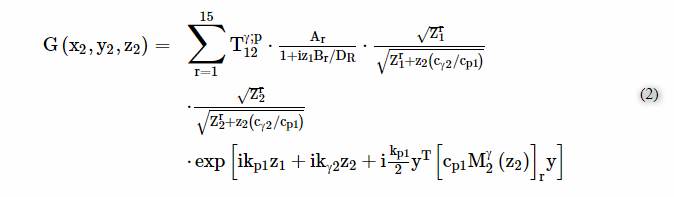
łD2╩Š│÷┴╦ė╔15Ė▀╦╣┬Ģ╩°»B╝ėĄ─┬Ģł÷Ą─╚²ŠSęĢłDĪŻį┌łD2ųąŻ¼a║═b▒Ē╩ŠłAą╬╗Ņ╚¹╠Įßśį┌Įī┘õXųąĄ─┬Ģł÷Ęų▓╝ĪŻē║┐s▓©╦┘Č╚×ķ6300m / sŻ¼╝¶Ūą▓©╦┘Č╚×ķ3100m / sŻ¼│¼┬Ģ▓©ūĶ┐╣×ķ17×105gm / cm 2 ·sĪŻ
═©▀^ī”┬Ģł÷Ęų▓╝└ĒšōĄ─Ęų╬÷║═3DęĢłDĄ─łD2Ż¼╬ęéāų¬Ą└łAą╬╗Ņ╚¹ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─┬Ģł÷ė╔Į³ł÷║═▀hł÷ā╔▓┐ĘųĮM│╔; ▓óŪęĮ³ł÷ėą║▄ČÓ▌^┤¾║═▌^ąĪ┬Ģē║ĪŻį┌▀hł÷Ż¼┬Ģē║ļSų°é„▓źŠÓļxĄ─į÷╝ėČ°ųØu£pąĪĪŻė╔ė┌łAą╬ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─┬Ģł÷čžŲõ▌SŠĆ╩Ūī”ĘQĄ─Ż¼ę“┤╦┐╔ęįčžų°▓©╩°Ą─é„▓źĘĮŽ“½@Ą├▓©╩°Ą─╚╬║╬ÖMĮž├µĄ─┬Ģē║Ęų▓╝╠žąį[ 14 ]ĪŻ
╚╗║¾Į³ł÷╣Ō╩°▒Ż│ųłAų∙é„▓źŻ¼Äū║§ø]ėą░l╔ó; ▀hł÷╣Ō╩°ęį┬■╔õĘĮ╩ĮöU╔óŻ¼Š▀ėąę╗Č©Ą─┬■╔õĮŪĪŻė╔NéĆ▒╗ĮoėĶĮ³ł÷N║═öU╔óĮŪαĄ─ķLČ╚=α 2 /λ ?║═α=Ę┤š²ŽęŻ©1.22λ ? / 2aŻ®ųąŻ¼ĘųäeŻ¼Ųõųąλ ?╩Ūį┌Įī┘▒┌Ą─│¼┬Ģ▓©Ą─▓©ķLŻ¼ a╩Ūę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─░ļÅĮ[ 15 ]ĪŻ
Å─╔Ž╩÷Ęų╬÷┐╔ęį═ŲöÓŻ¼čžų°┬Ģ╩°Ą─é„▓źĘĮŽ“Ż¼│¼┬Ģ▓©╩°Ą─╚╬║╬ÖMĮž├µČ╝į┌łAą╬ģ^ė“ųąĪŻę“┤╦Ż¼«ö┬Ģ╩°į┌é„▓źŠÓļxų«║¾ĄĮ▀_╚▌Ų„Ą─ā╚▒Ē├µĢrŻ¼═Čė░╩ŪłAą╬Įž├µŻ¼Ųõųą╣Ō╩°─▄┴┐ų„ę¬╝»ųąĪŻ╬ęéāīó═Čė░łAĘQ×ķ─▄┴┐łAŻ¼Ųõų▒ÅĮė├d▒Ē╩ŠŻ¼dĄ─ųĄ┐╔ęįė├╣½╩ĮŻ©3Ż®ėŗ╦ŃŻ║![]()
ėŗ╦Ń╗ž┬Ģ┬Ģē║
ė╔ė┌Ė▀╦╣┬Ģ╩°╩Ū┤╣ų▒ė┌ŲĮ├µĄ─Įń├µŻ¼ŲõĘ┤╔õ║══Ė╔õ╠žąįū±čŁŲĮ├µ▓©[é„▓ź16Ż¼17 ]ĪŻę“┤╦Ż¼Ę┤╔õŽĄöĄėŗ╦Ń╚ńŽ┬Ż║

Ųõųąc 1Ż¼c 2╩ŪĮķ┘|ųą┬Ģ╦┘Ż¼θi╩Ū╚ļ╔õĮŪŻ¼θr╩ŪĘ┤╔õĮŪĪŻ
╚ńłD3╦∙╩ŠŻ¼╝┘įO╚▌Ų„Ą─▒┌║±×ķL; ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─░ļÅĮ╩Ūa; ═©▀^īółAą╬ę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─ųąą─Oū„×ķū°ś╦įŁ³cüĒĮ©┴óū°ś╦ŽĄĪŻĖ∙ō■ČÓį¬Ė▀╦╣╣Ō╩°─Żą═Ż¼ūīz 1 = 0Ż¼z 2 = LŻ¼ė╔łAą╬ę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„į┌╚▌Ų„ā╚▒┌╔ŽĄ─╚╬║╬³cpŻ©x 2Ż¼y 2Ż¼z 2Ż®░l╔õĄ─│¼┬Ģē║┴”P L.▒┌║±L┐╔ęį▒Ē╩Š×ķ

Ė∙ō■ęį╔Žī”─▄┴┐łAĄ─Ęų╬÷Ż¼īóų▒ÅĮ×ķdĄ─łAą╬┴║Įž├µųąĄ─┬Ģē║ĘeĘų; ╝┘įO─▄┴┐łAĄ─┐é├µĘeė╔─▄┴┐╚”▒Ē╩ŠŻ¼▓óŪę─▄┴┐╚”ųąĄ─ŲĮŠ∙┬Ģē║½@Ą├╚ńŽ┬Ż║

Ė∙ō■┬ĢīWĄ─╗∙▒Šų¬ūRŻ¼│¼┬Ģ▓©į┌Š▀ėą▓╗▀B└mūĶ┐╣Ą─Įń├µ╠Ä▒╗š█╔õ║═Ę┤╔õŻ¼Ųõū±čŁŲĮ├µ┬Ģ▓©Ą─š█╔õ║═Ę┤╔õįŁ└ĒĪŻ╝┘įO╚▌Ų„ā╚▒┌Ą─ŲĮŠ∙Ę┤╔õ╗ž┬Ģ┬Ģē║×ķp[RĪźĪźĪźŻ¼ ╚╗║¾
![]()
į┌īŹļHÖz£yųąŻ¼«öę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„čžų°▒┌Ą─═Ō▒Ē├µŽ“╔ŽęŲäė▓óŪę─▄┴┐łAĄ─Ēö▓┐│¼▀^ę║╬╗ĢrŻ¼ČÓėÓĄ─Ė▀Č╚ė╔ΔdŻ©0≤Δd≤dŻ®▒Ē╩ŠŻ¼╝┤ę║╬╗ęį╔ŽĄ─ģ^ė“▒Ē╩Š×ķA eŻ¼┴Ņr s = A e / A.
«ö0≤Δd≤dĢrŻ¼“─▄┴┐łA”ė╔ę║╬╗Ęų×ķā╔▓┐ĘųŻ¼┬Ģ─▄ūĶ┐╣į┌─▄┴┐łAĄ─ā╔éĆ▓┐Ęų▓╗į┘ŽÓĄ╚Ż¼▀@īóī¦ų┬ā╔▓┐ĘųĄ─┬ĢīW▀ģĮńŚl╝■ę▓▓╗═¼ĪŻę“┤╦Ż¼╦³ė╔ā╔▓┐Ęųėŗ╦ŃŻ¼▓ó┤·▒Ē─▄┴┐╚”ā╔▓┐ĘųĄ─Ę┤╔õŽĄöĄ; ę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Įė╩šĄ─╗ž┬Ģ┬Ģē║æ¬ė╔─▄┴┐╚”Ą─ā╔éĆ▓┐Ęų»B╝ėĪŻ
╬ęéā╝┘įOį┌n┤╬ų«║¾Ż¼ē”▒┌ųąĄ─Ę┤╔õ╗ž▓©īó╦ź£pĄĮĘŪ│ŻąĪĄ─┴┐Ż¼▀@ŽÓī”ė┌Įė╩šę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Įė╩šĄ─┐é─▄┴┐┐╔ęį║÷┬į▓╗ėŗĪŻ
ę“┤╦Ż¼«ö┬Ģ╩°į┌n┤╬║¾ĘĄ╗žĄĮē”▒┌Ą─═Ō▒Ē├µĢrŻ¼ę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„Ą─┐é┬Ģē║═©▀^ęįŽ┬Ą╚╩Įī¦│÷Ż║

ŲõųąŻ¼╚▌Ų„▒┌╠ÄĄ─│¼┬Ģ╦ź£pŽĄöĄ┤·▒Ēę║╬╗ėŗę║╬╗ėŗę║╬╗ėŗé„ĖąŲ„▒Ē├µĘ┤╔õŽĄöĄĪŻ
3.īŹ“×ĮY╣¹
ŽĄĮy░▓čb║═│§╩╝Śl╝■
łD4’@╩Š┴╦īŹ“׎ĄĮyĄ─ĮM│╔ĪŻ
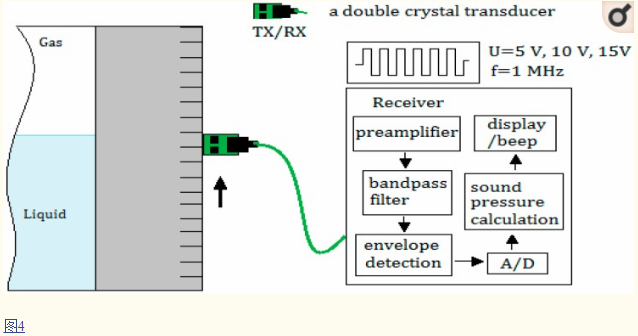
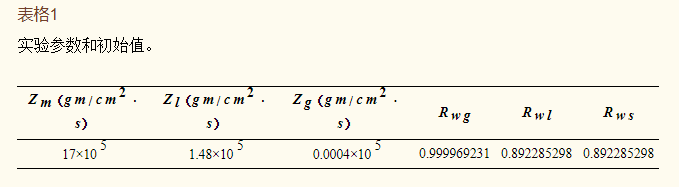
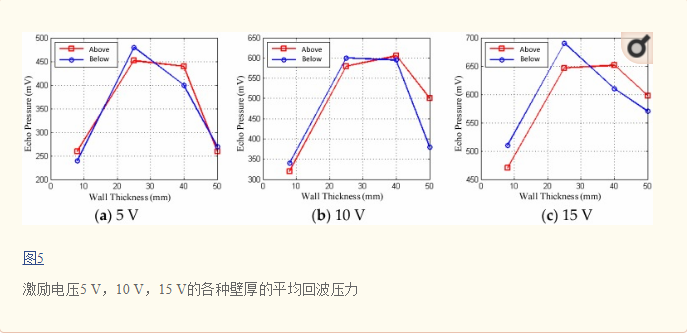
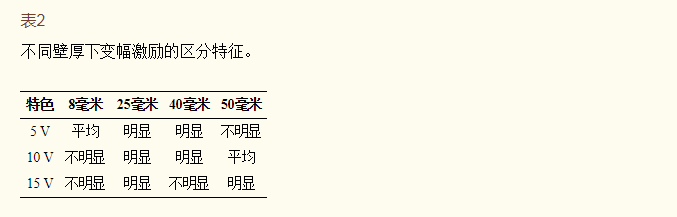
į┌īŹ“×ųą╩╣ė├╦─ĮM▓╗═¼▒┌║±Ż¼8mmŻ¼25mmŻ¼40mm║═50mmĄ─╚▌Ų„▀Mąą£y┴┐; ╚▌Ų„Ą─╬’┘|╩ŪõX║ŽĮŻ¼ę║¾wū„×ķ╚▌Ų„ųąĄ─ę║¾wĮķ┘|Ż¼┤¾ÜŌū„×ķÜŌ¾wĮķ┘|ĪŻ▒Ē1ųąĄ─ģóöĄ’@╩ŠĮī┘╚▌Ų„Z mĄ─ūĶ┐╣Ż¼╚▌Ų„Z lųąę║¾wĮķ┘|Ą─ūĶ┐╣Ż¼╚▌Ų„ųąÜŌ¾wĮķ┘|Ą─ūĶ┐╣Z gŻ¼ā╚▒┌┼cÜŌ¾wR wgų«ķgĄ─Ę┤╔õŽĄöĄŻ¼Ę┤╔õā╚▒┌║═ę║¾wR wlų«ķgĄ─ŽĄöĄŻ¼ęį╝░═Ō▒┌║═╠ĮßśR wsų«ķgĄ─Ę┤╔õŽĄöĄĪŻ
“īäėį┤įOėŗ×ķ▀B└m▓©š±Ę∙╝żäŅŻ¼╝┤▀B└m▓©Ą─š±Ę∙į┌5VŻ¼10V║═15VĄ─╚²éĆų▄Ų┌ųąę└┤╬▀MąąŻ¼ęį“īäė╠ĮŅ^░l╔õ▓╗═¼š±Ę∙Ą─│¼┬Ģ▓©ĪŻė╔ė┌╩╣ė├▀B└m▓©╝ż░lŻ¼│¼┬ĢōQ─▄Ų„┼cļpŠ¦╠ĮŅ^ę╗Ų╩╣ė├Ż¼ę╗éĆė├ė┌░l╔õŻ¼ę╗éĆė├ė┌Įė╩šŻ¼▓óŪęā╔š▀Č╝Š▀ėą10mmĄ─ų▒ÅĮ║═50mmĄ─Į╣ŠÓĪŻ
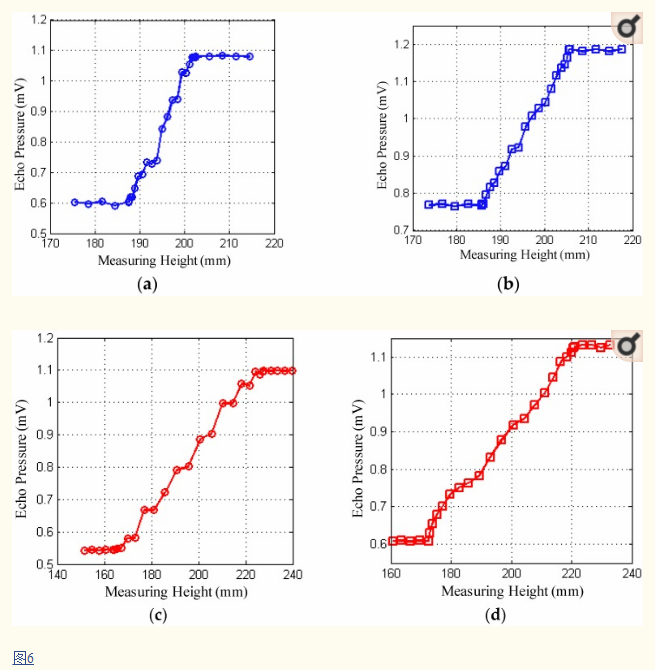
╚ńłD5╦∙╩ŠŻ¼ī”ė┌▓╗═¼Ą─Ę∙Č╚╝żäŅą┼╠¢ųĄŻ¼į┌ę║╬╗ų«╔Ž║═ų«Ž┬Ą─╗ž▓©─▄┴┐Ą─ā╔éĆ┼RĮńųĄų«ķgĄ─▓Ņ«Éį┌ĮoČ©Ą─£yįćŁhŠ│ųą’@╩Š│÷▓╗═¼Ą─╠žąįĪŻį┌▒Ē2ųąŻ¼«öį┌╚▌Ų„▒┌║±Ą─╦∙ėąģ^ė“ųą╝ż╗Ņ╚²éĆĘ∙Č╚ļŖē║ą┼╠¢ĢrŻ¼╩╝ĮK┤µį┌ę╗ĮM┼c║±▒┌Ųź┼õĄ─╝żäŅļŖē║ųĄŻ¼▓óŪęę║¾w╦«ŲĮĄ═ė┌ā╔éĆ┼RĮńųĄĄ─╗ž▓©─▄┴┐▓Ņ«É╩ŪĖ³Ė▀Ą─Ęų▒µ┬╩Ż¼├„┤_Ą─ģ^äeŻ¼▀@×ķ┼ąöÓę║╬╗┤_Č©╠ß╣®┴╦ę└ō■ĪŻ
╗ž┬Ģ┬Ģē║ėŗ╦Ń
łD6╩Š│÷┴╦ßśī”▓╗═¼▒┌║±Ą─▓╗═¼│▀┤ńĄ─╠ĮßśĄ─īŹļH£y┴┐ųĄŻ¼ÖMū°ś╦▒Ē╩Š╠Įßśčž╚▌Ų„═Ō▒┌£y┴┐Ą─Ė▀Č╚Ż¼┐vū°ś╦▒Ē╩ŠĮė╩š╠ĮßśĮė╩šĄ─╗ž▓©ē║┴”Ą─Ę∙Č╚ĪŻ│¼┬Ģ╗ž▓©ė╔Įė╩šļŖ┬ĘĮė╩šĪŻī”╗ž▓©ą┼╠¢Ą─į÷ęµ▀MąąĘ┼┤¾Ż¼×V▓©Ż¼Öz£yęį▀MąąöĄō■╠Ä└ĒŻ¼▓ó▐DōQ×ķŽÓæ¬Ą─ļŖē║Ę∙Č╚’@╩Š▌ö│÷ĪŻį┌įōłDųąŻ¼╝żäŅļŖē║įOČ©×ķ15VŻ¼└²╚ń▒┌║±×ķL = 8mmŪęL = 50mmĪŻ
╦«ŲĮ£y┴┐ĮY╣¹
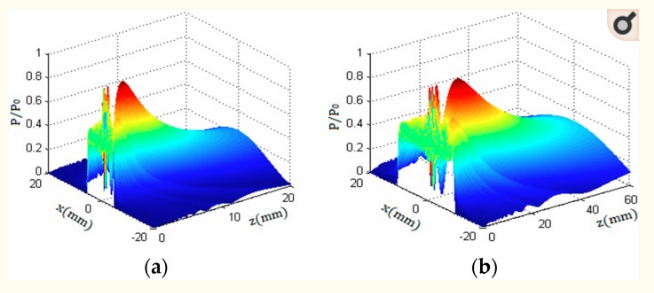
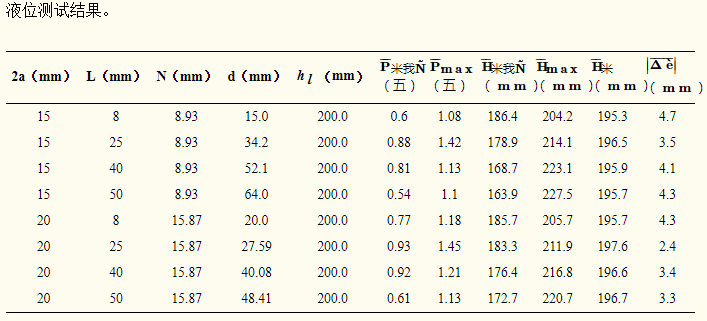
łD7’@╩Š┴╦╩╣ė├Ą┌3╣ØųąĄ─└Ēšō─Żą═▀Mąąę║╬╗£yįćĄ─šµīŹĮY╣¹ĪŻ╚▌Ų„ųąĄ─ę║╬╗×ķ╦«Ż¼īŹļHę║╬╗×ķ200║┴├ūĪŻį┌įōīŹ“×ųąŻ¼╩╣ė├ų▒ÅĮ×ķ15mm║═20mmĄ─ā╔ĘN▓╗═¼│▀┤ńĄ─ōQ─▄Ų„üĒ£y┴┐▒┌║±LĘųäe×ķ8mmŻ¼25mmŻ¼40mm║═50mmĄ─ę║╬╗ĪŻPĪź▌^┤¾ ║═ PĪźĘų▒ĒŻ©▒Ē3Ż®ųąĄ─╗ž┬Ģ┬Ģē║ųĄĘųäeį┌╔ŽŽ┬┼RĮń╬╗ų├£yĄ├Ż¼h l╩ŪīŹļHĄ─ę║╬╗ųĄŻ¼HĪź▌^┤¾ ║═ HĪźĘų Ęųäe╩Ūę║╬╗Ą─╔ŽŽ┬┼RĮń╬╗ų├Ą─Ė▀Č╚ĪŻ HĪź├ū ╩ŪīŹļHĄ─£y┴┐ĮY╣¹Ż¼║═ ||Δ èĪźĪźĪźĪźĪź||╩Ū£y┴┐Ą─ŲĮŠ∙š`▓ŅĪŻ▒ĒųąĄ─╦∙ėą£y┴┐ųĄŠ∙×ķ╚²┤╬īŹ“ץ─ŲĮŠ∙ųĄĪŻ
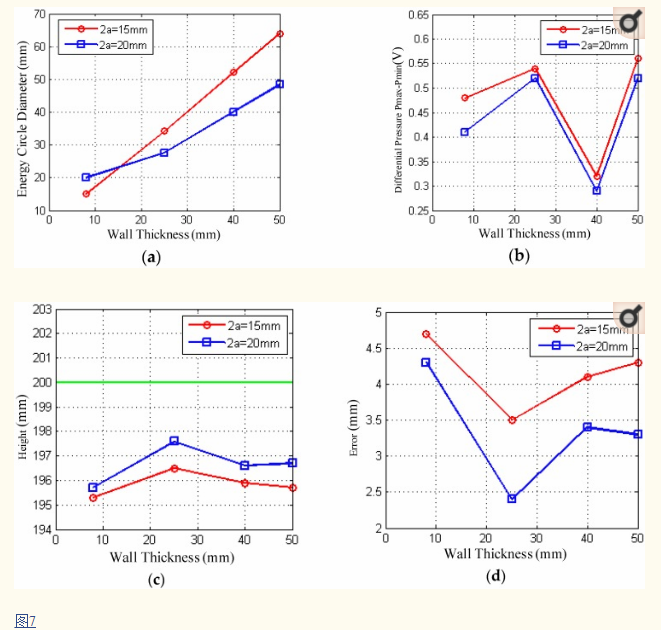
łD7a╩Š│÷┴╦─▄┴┐łAĄ─ų▒ÅĮd┼cė╔▓╗═¼▒┌║±Ą─ā╔éĆ▓╗═¼ų▒ÅĮĄ─╠Įßś«a╔·Ą─┴║Ą─▒┌║±Lų«ķgĄ─ī”æ¬ĻPŽĄĪŻį┌įōłDųąŻ¼ų▒ÅĮ×ķ15mmĄ─ōQ─▄Ų„ļSų°é„▓źŠÓļxĄ─į÷╝ėČ°Ė³┐ņĄž░l╔õ│¼┬Ģ▓©╩°░l╔óĪŻį┌ŽÓ═¼Ą─▒┌║±Ž┬Ż¼─▄┴┐łAĄ─ų▒ÅĮdŠĆąįį÷╝ėŻ¼▀@▒Ē├„╣Ō╩°┐ņ╦┘öU╔óŻ¼┬Ģ╩°į┌ŽÓæ¬─▄┴┐łAĄ─å╬╬╗├µĘeā╚Ą──▄┴┐ę▓£pąĪŻ¼╝┤ŲĮŠ∙┬Ģē║╣Ō╩°£pąĪĢ■ė░ĒæÖz£yĘų▒µ┬╩ĪŻė╔ų▒ÅĮ×ķ20mmĄ─ōQ─▄Ų„«a╔·Ą─╣Ō╩°░l╔óŽÓī”ŲĮ╠╣ĪŻ
łD 7b╩Š│÷┴╦į┌ā╔éĆĻPµI╬╗ų├╠Äė╔╠ĮŅ^Ą─ā╔éĆ▓╗═¼ų▒ÅĮĮė╩šĄ─╗ž┬Ģ┬Ģē║┼cį┌▓╗═¼▒┌║±Ž┬Ą─▒┌║±Lų«ķgĄ─ī”æ¬ĻPŽĄĪŻ▓╗═¼▒┌║±Ą─ā╔ĘN▓╗═¼ų▒ÅĮĄ─╠ĮŅ^’@╩Š│÷ŽÓ═¼Ą─ūā╗»ĪŻ▒┌║±×ķ40 mmĢrŻ¼ē║▓ŅūāĄ├▌^ąĪĪŻ▒┌║±×ķ25mm║═50mmĢrŻ¼ē║▓Ņūā┤¾ĪŻ▀@ī”ė┌£y┴┐╦«ŲĮ║═╠ßĖ▀£y┴┐Ęų▒µ┬╩ĘŪ│Żėąė├ĪŻį┌▒┌║±×ķ8mmĢrŻ¼ė╔ė┌į┌╠ĮŅ^║═╚▌Ų„▒┌ų«ķg╩╣ė├čė▀tēKŻ¼į┌╔ŽŽ┬┼RĮń╬╗ų├╠ÄĄ─ē║ĮĄę▓Ė³├„’@ĪŻ
Å─łD7ųą▀Ć┐╔ęį┐┤│÷bŻ¼«ö╩╣ė├ąĪų▒ÅĮ╠ĮßśĢrŻ¼▓╗═¼▒┌║±Ą─ā╔éĆ┼RĮń╬╗ų├╠ÄĄ─╗ž▓©ē║┴”ų«ķgĄ─▓Ņ«É═©│ŻĖ▀ė┌▌^┤¾ų▒ÅĮ╠ĮßśĪŻļSų°ōQ─▄Ų„ų▒ÅĮĄ─į÷╝ėŻ¼│¼┬Ģ▓©╩°īóūāĄ├Ė³╝ėŠ█Į╣Ż¼░l╔óĮŪūāąĪŻ¼Č°Į³ł÷Ą─ķLČ╚īóūāķLŻ¼ā╔éĆĻPµI╬╗ų├ų«ķgĄ─ķgŠÓę▓īóūāąĪŻ¼▓óŪęņ`├¶Č╚Ė³Ė▀ĪŻōQ─▄Ų„Ģ■ūāĖ▀Ż¼Ą½Ęų▒µ┬╩Ģ■ĮĄĄ═ĪŻŽÓĘ┤Ż¼ļSų°ōQ─▄Ų„ų▒ÅĮ£pąĪŻ¼Į³ł÷ķLČ╚£pąĪ▓óŪęöU╔óĮŪį÷╝ėĪŻ│¼┬Ģ▓©╩°īóūāĄ├Ė³╝ė░l╔óŻ¼▓óŪęā╔éĆĻPµI╬╗ų├ų«ķgĄ─ķgĖ¶ę▓īóį÷╝ėĪŻōQ─▄Ų„Ą─ņ`├¶Č╚Ģ■ĮĄĄ═Ż¼Č°Ęų▒µ┬╩Ģ■Ė³Ė▀ĪŻ
łD7c╩Ūā╔éĆ╠ĮßśĄ─£yįćĮY╣¹┼cīŹļH╦«ŲĮųĄĄ─▒╚▌^ĪŻÅ─łDųą┐╔ęį┐┤│÷Ż¼£yįćĮY╣¹é╚Ą─╠ĮŅ^Ą─ā╔éĆų▒ÅĮĄ═ė┌īŹļH╦«ŲĮĪŻŽĄĮyÕeš`╩Ūė╔ŽĄĮyĄ─£y┴┐─Żą═ę²ŲĄ─ĪŻį┌Õeš`Ęų╬÷ų«║¾æ¬įō╠ß│÷║¾└mąŻš²ĘĮĘ©üĒą▐Ė─Õeš`ųĄĪŻ┴Ē═ŌŻ¼ę“×ķā╔éĆ╠ĮßśĄ─Į³ł÷ķLČ╚Č╝┤¾ė┌8mmŻ¼╦∙ęįčė▀tēKė├ū„┤╬╝ē£y┴┐ęį╠ßĖ▀Öz£yŠ½Č╚ĪŻ╚╗Č°Ż¼Å─£yįćĮY╣¹┐╔ęį┐┤│÷Ż¼▒┌║±L = 8mmĄ─£y┴┐ųĄ╚į╚╗┤¾┤¾Ų½ļxĪŻÅ─š¹¾w£y┴┐Ą─ĮŪČ╚üĒ┐┤Ż¼╩╣ė├▌^┤¾ų▒ÅĮ╠Įßś£y┴┐Ą─ĮY╣¹▒╚╩╣ė├▌^ąĪų▒ÅĮ╠Įßś£y┴┐Ą─ĮY╣¹ŽÓī”ĮėĮ³šµīŹ╦«ŲĮĪŻ
łD7d’@╩Š┴╦Ęųäe╩╣ė├ā╔ĘN╠ĮßśÖz£y╦─ĘN▓╗═¼▒┌║±Ž┬Ą─ę║╬╗Ą─š`▓ŅĪŻÅ─łDųą┐╔ęį┐┤│÷Ż¼«ö▒┌║±L = 8mmĢrŻ¼ā╔éĆ╠ĮßśĄ─£y┴┐š`▓Ņ▀_ĄĮ╝s4mm~5mmĪŻ▒┌║±L≥25mmĢrŻ¼£y┴┐š`▓Ņ£pąĪĪŻ«ö▒┌║±L = 25 mmĢrŻ¼╠ĮŅ^š`▓ŅųĄĄ─ā╔ĘN▓╗═¼│▀┤ńęč▀_ĄĮ▌^ąĪųĄĪŻ╚╗Č°Ż¼Å─š¹¾wŪķør┐╔ęį┐┤│÷Ż¼▌^┤¾ų▒ÅĮ╠ĮßśĄ─£y┴┐š`▓Ņ┬įĄ═ė┌ąĪų▒ÅĮ╠ĮßśĄ─£y┴┐š`▓ŅĪŻā╔éĆ╠ĮßśĄ─£y┴┐š`▓Ņ═©│Ż▒Ż│ųį┌╝s3~5mmĪŻ
4ĪŻėæšō
į┌įōįOėŗĄ─│¼┬Ģ▓©ę║╬╗ėŗ£y┴┐ųąŻ¼╩ūŽ╚═©▀^£y┴┐ę║╬╗ĖĮĮ³Ą─Ę┤╔õ┬Ģ▓©Ą─ūā╗»╠žąįüĒ┤_Č©╔Ž┼RĮń╬╗ų├║═Ž┬┼RĮń╬╗ų├ĪŻį┌£y┴┐─Żą═ųąŻ¼ę║¾wĮķ┘|║═┤¾ÜŌĮķ┘|Ą─ūĶ┐╣╩Ūė░Ēæ£y┴┐Š½Č╚Ą─ų„ę¬ę“╦žĪŻūĶ┐╣▌^┤¾Ą─ę║¾wĮķ┘|Ż¼ŲõĘ┤╔õ┬Ģē║ūā╗»║▄┤¾Ż¼ęūė┌┤_Č©╔ŽŽ┬┼RĮń╬╗ų├║═ę║╬╗; į┌ļŖūĶ▌^ąĪĄ─ę║¾wĮķ┘|ųąŻ¼Ę┤╔õ┬Ģē║ø]ėą├„’@ūā╗»Ż¼ļyęį╣╠Č©╔ŽŽ┬┼RĮń╬╗ų├║═ę║╬╗ĪŻę“┤╦Ż¼Ė³Ė▀ūĶ┐╣Ą─ę║¾wĮķ┘|Ė³╚▌ęū┤_Č©Ż¼
īŹ“×ĮY╣¹▒Ē├„Ż¼═©▀^ā╔ĘN▓╗═¼ų▒ÅĮ│▀┤ńĄ─╠ĮŅ^Ż¼Ę┤╔õ┬Ģš±Ę∙Ą─ęÄ┬╔ąįŽÓ╦ŲĪŻ«öąĪų▒ÅĮ╠ĮŅ^ė├ė┌▓╗═¼Ą─▒┌║±ĢrŻ¼Ę┤╔õ┬ĢĄ─▓Ņ«Éę╗░Ń┤¾ė┌┤¾ų▒ÅĮ╠ĮŅ^; ╚╗Č°Ż¼ę║¾wĄ─£y┴┐ĮY╣¹▒Ē├„Ż¼ė╔ė┌▓╗═¼ų▒ÅĮ╠Įßśį┌╠ž╩Ō£yįćŁhŠ│ųąĄ─▓╗═¼╬’└Ē╠žąįŻ¼┤¾ų▒ÅĮ╠ĮßśĄ─Š½Č╚ā×ė┌ąĪ╠ĮßśŻ¼ęįŲĮ║Ō£yįćņ`├¶Č╚║═╠Įßśį┌ę╗éĆ▀^│╠ųąĄ─Ęų▒µ┬╩ĪŻę“┤╦Ż¼į┌▒Š╬─ųąĻPė┌│¼┬Ģ▓©ę║¾w╬╗ų├£y┴┐Ż¼╠ĮŅ^ų▒ÅĮĄ─▀xō±╚ĪøQė┌▒┌║±║═Ųõ╦¹╬’└Ēąį┘|Ą─£y┴┐Ż¼ęįĖ³║├ĄžŲĮ║ŌŲõĘų▒µ┬╩║═ņ`├¶Č╚ĪŻ
5ĪŻĮYšō
į┌▒ŠčąŠ┐ųąŻ¼į┌ņoæB£y┴┐Śl╝■Ž┬Ż¼ī”ė┌╣żśIųąĄ─įSČÓ│ŻęŖę║¾w╗“╗ņ║Žę║¾wŻ¼─Żą═Ą─£y┴┐Š½Č╚ąĪė┌±5 mm; ī”ė┌Įī┘╚▌Ų„Ż¼įć“×║±Č╚┐╔▀_2~50 mmĪŻę“┤╦Ż¼╦∙╠ß│÷Ą─ĘĮĘ©ī”ė┌├▄ĘŌ╚▌Ų„═ŌĄ─ę║╬╗£y┴┐╩Ūėąą¦Ą─ĪŻ
- [╣½╦Šą┬┬ä] ┤┼ĘŁ░Õę║╬╗ėŗėą£y┴┐├żģ^åß 2021-12-06
- [ąąśIą┬┬ä] ▓Ņē║ūā╦═Ų„įōį§├┤ŠSūo 2021-11-29
- [ąąśIą┬┬ä] ĖĪŪ“ę║╬╗ėŗ▒ŻBĢrūóęŌ╩┬ĒŚ 2021-11-25
- [╣½╦Šą┬┬ä] ┤┼├¶ļp╔½ę║╬╗ėŗ┼c┤┼ĘŁ░Õę║╬╗ėŗėą╩▓├┤ģ^äe 2021-11-16
- [╣½╦Šą┬┬ä] įņ│╔┤┼ĘŁ░Õę║╬╗ėŗā╚ĖĪūėŽ┬│┴Ą─│ŻęŖįŁę“Č╝ 2021-11-10
- [ąąśIą┬┬ä] ▓Ż┴¦╣▄ę║╬╗ėŗĄ─æ¬ė├ 2020-08-01
- [╝╝ągīŻŅ}] ╩»ė═ā”╣▐ę║╬╗£y┴┐▀xō±└ū▀_ę║╬╗ėŗ║¾Ą─░▓čb 2012-10-26
- [╝╝ągīŻŅ}] └ū▀_ę║╬╗ėŗ░▓čbę¬Ū¾ 2012-10-21
- [╝╝ągīŻŅ}] │¼┬Ģ▓©ę║╬╗ėŗĄ─ā׳c║═ŪÕŽ┤ĘĮ╩Į 2012-10-20
- [╝╝ągīŻŅ}] į§śė▀x┘ÅĖ▀£žĖ▀ē║ą═┤┼ĘŁ░Õę║╬╗ėŗ 2012-10-20